
Tin chuyên ngành
LÀM THẾ NÀO ĐỂ THỰC HIỆN MỘT PHÉP ĐO MÁY HIỆN SÓNG HOÀN HẢO (Phần 1)
Với máy hiện sóng ngày nay, ta dễ dàng thực hiện một phép đo tín hiệu tốt. Tuy nhiên để thực hiện một phép đo hoàn hảo thì cần phải có một số kỹ năng chuyên môn. Khi tăng tốc độ xung và giảm điện áp, giới hạn sai số của tín hiệu trở nên nhỏ hơn và nhỏ hơn nữa.
Máy hiện sóng số đã chuyển các phép đo thủ công thành một quy trình tự động cho phép bạn thực hiện các phép đo đầy đủ, nhanh chóng và dễ dàng. Tuy nhiên, việc chuyển từ một phép đo tốt thành một phép đo hoàn hảo đòi hỏi cần thêm một ít kiến thức và nỗ lực. Tốc độ tín hiệu và số bit của độ phân giải sẽ ảnh hưởng đến chất lượng phép đo, vì vậy điều quan trọng ở đây là phải hiểu làm thế nào để tận dụng tối đa hiệu suất của máy hiện sóng.
Bắt đầu bằng cách thực hiện một phép đo tốt
Đầu tiên, thiết lập máy hiện sóng để thực hiện phép đo. Đơn giản chỉ cần nhấn nút “Measure” ở mặt trước. Máy hiện sóng sẽ tự động hiển thị các phép đo yêu cầu trên màn hình. Bạn có thể cấu hình máy hiện sóng để sửa đổi các tham số đo lường, theo dõi phép đo bằng các con trỏ, và thậm chí hiển thị thống kê đo lường. Để nâng cao chất lượng của phép đo, hãy xem xét các phương pháp sau đây:
Điều chỉnh tỷ lệ tín hiệu
Điều chỉnh tỷ lệ tín hiệu thích hợp rất quan trọng để tối ưu hóa phép đo. Tỉ lệ của tín hiệu trên màn hình ảnh hưởng đến tốc độ lấy mẫu và số bit của độ phân giải, do đó nó ảnh hưởng đến độ chính xác của phép đo. Theo những cách khác nhau, cả tỷ lệ trục ngang và trục đứng đều ảnh hưởng đến phép đo.
Điều chỉnh tỷ lệ trục ngang
Khi thực hiện các phép đo phụ thuộc vào thời gian, việc điều chỉnh tỷ lệ trục ngang là rất quan trọng. Thay đổi tỷ lệ trục ngang (time/div) của tín hiệu đồng nghĩa với việc làm thay đổi tổng thời gian thu tín hiệu. Thời gian thu được tín hiệu ảnh hưởng đến tốc độ lấy mẫu của máy hiện sóng. Mối quan hệ này được mô tả bằng phương trình:
Tốc độ lấy mẫu = Độ sâu bộ nhớ / Thời gian thu tín hiệu
Độ sâu bộ nhớ là một giá trị cố định, còn thời gian thu được cố định bằng cách điều chỉnh cài đặt time/div trên máy hiện sóng. Khi thời gian thu tăng, tốc độ lấy mẫu sẽ giảm. Tốc độ lấy mẫu thích hợp quan trọng cho các phép đo phụ thuộc thời gian (tần số, độ rộng xung, độ rộng sườn lên, …).
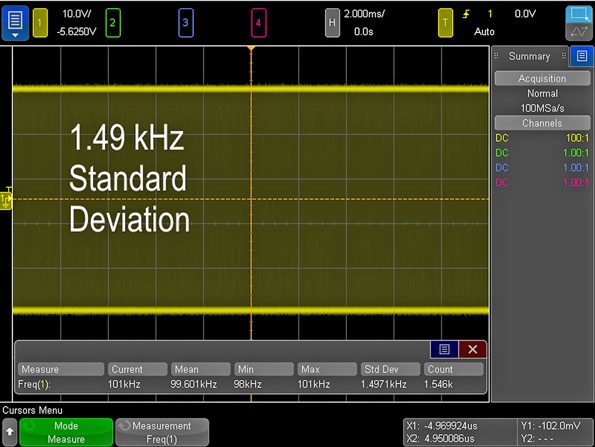
Hình 1
Ví dụ, thực hiện phép đo tần số cho tín hiệu xung đồng hồ 100kHz đã biết (Hình 1). Khi tỉ lệ trục ngang là 2ms/div, chúng ta quan sát được tần số đo trung bình 99,6 kHz với độ lệch chuẩn 1,48kHz. Dựa trên độ lệch chuẩn, ta thấy rằng độ chính xác của phép đo khoảng 1,5%. Lưu ý rằng tốc độ lấy mẫu là 100 Msample/s do thiết lập tham số time/div trên máy hiện sóng.
Nhìn vào tín hiệu đồng hồ 100 kHz ở 1,2 μs/division thay vì 2 ms/division (Hình 2), chúng ta thấy tần số đo trung bình là 100,00 kHz và độ lệch chuẩn là 1,53 Hz. Điều này cho biết độ chính xác của phép đo khoảng 0,001%. Cũng lưu ý tốc độ lấy mẫu 5 Gsamples/s là tốc độ lấy mẫu tối đa trên máy hiện sóng Keysight InfiniiVision 4000 X-Series đang được sử dụng.
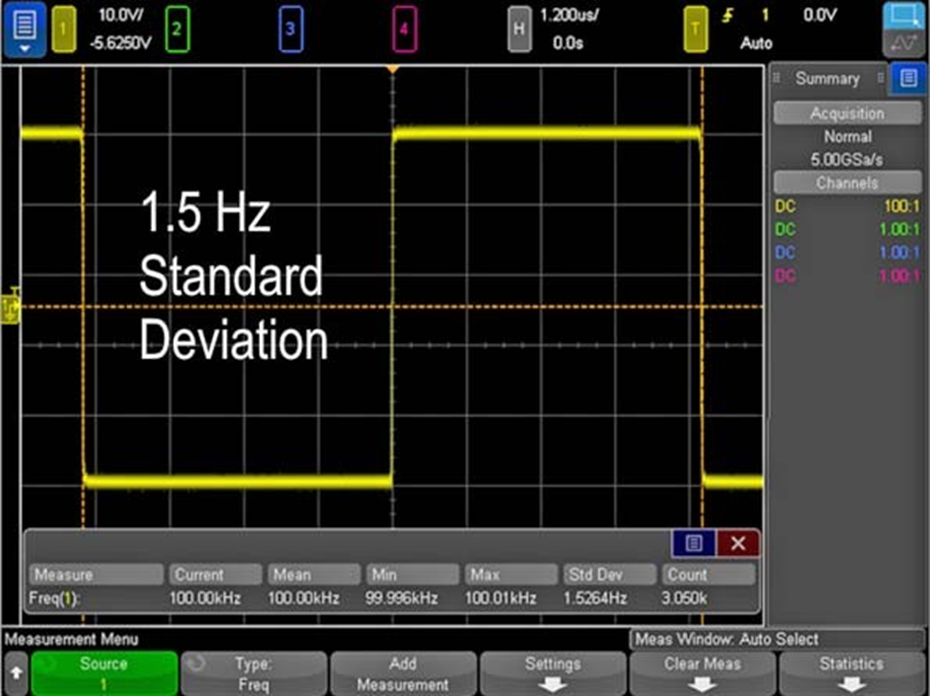
Hình 2
Bằng cách căn chỉnh tỷ lệ trục ngang của tín hiệu để chỉ hiển thị một khoảng thời gian, chúng ta có thể tối đa hóa tốc độ lấy mẫu và cải thiện độ lệch tiêu chuẩn của phép đo tần số bằng hệ số 1000.
Điều chỉnh tỷ lệ trục đứng
Nếu như việc điều chỉnh tỷ lệ trục ngang quan trọng đối với các phép đo thời gian cụ thể thì việc điều chỉnh tỷ lệ trục đứng cũng rất quan trọng đối với các phép đo phụ thuộc theo trục đứng (đỉnh – đỉnh, RMS, max, min, etc,…).
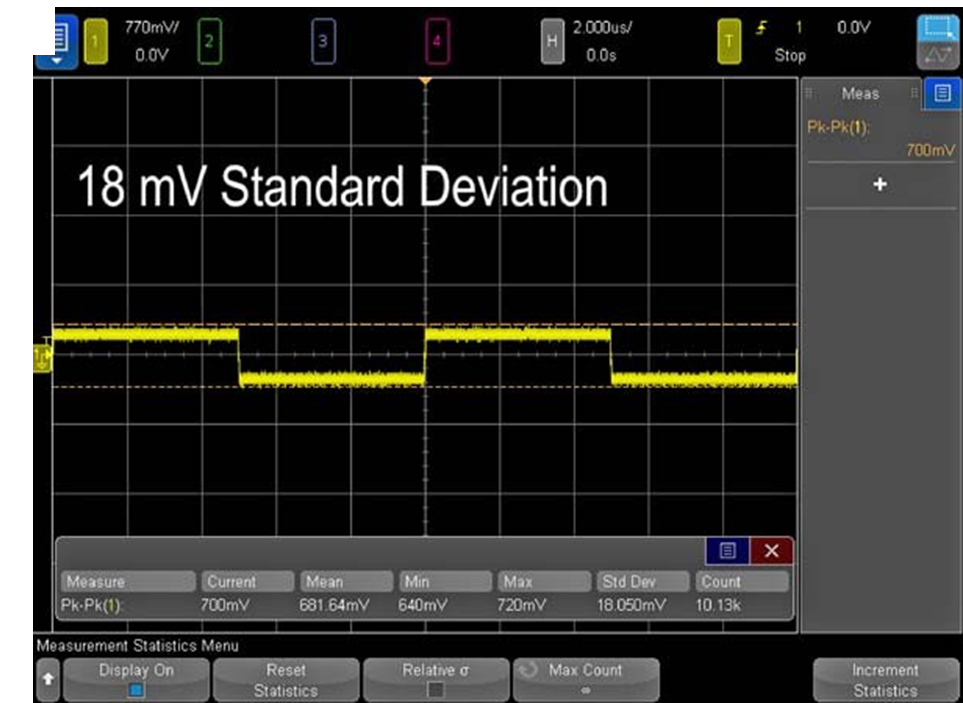
Hình 3
Lấy ví dụ, cùng một tín hiệu đồng hồ 100 kHz như trên. Lần này chúng ta sẽ xem xét phép đo điện áp đỉnh – đỉnh (Hình 3). Tại 770 mV/div, chúng ta thấy rằng giá trị VP-P trung bình là 681 mV và độ lệch tiêu chuẩn là 18,1 mV.
Bằng cách tăng tỷ lệ volt/div (Hình 4), giá trị trung bình sẽ trở thành 512,5 mV và độ lệch tiêu chuẩn trở thành 1,2 mV.
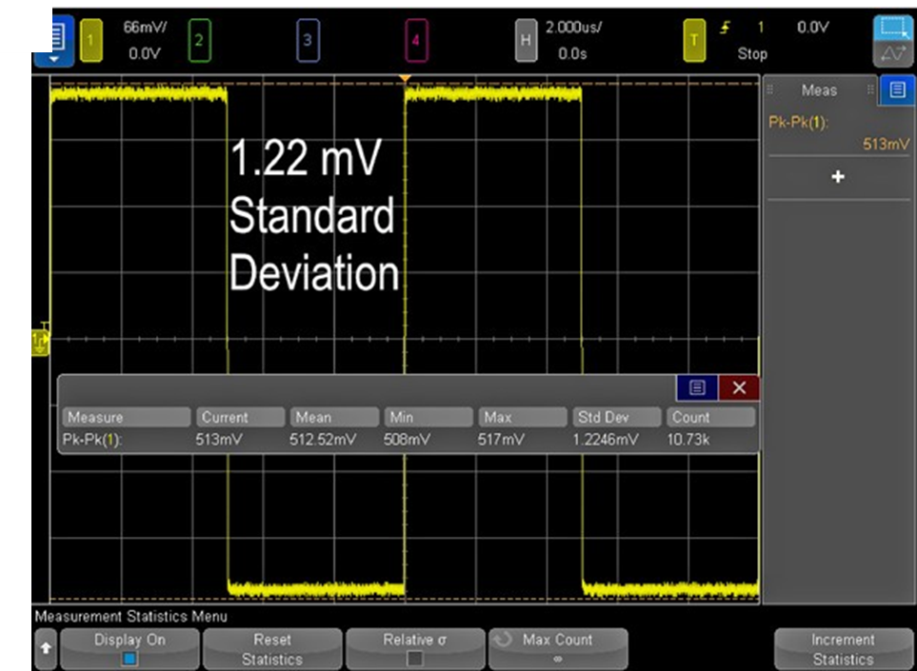
Hình 4
Tăng tỉ lệ trục đứng của tín hiệu cho phép đo VPP chính xác hơn nhiều với độ lệch chuẩn nhỏ hơn 15 lần. Tại sao điều chỉnh tỷ lệ trục đứng lại ảnh hưởng đến phép đo? Giống như các phép đo trục ngang (phụ thuộc thời gian) bị ảnh hưởng bởi tốc độ lấy mẫu, các phép đo trục đứng (biên độ) phụ thuộc vào số bit của độ phân giải.
Nguồn: RSI
Các bài viết khác
- QUY ĐỊNH MỚI VỀ XÁC ĐỊNH XUẤT XỨ HÀNG HÓA XUẤT, NHẬP KHẨU
- GIẢM THUẾ GTGT TỪ 10% XUỐNG 8% TỪ NGÀY 1/7/2023
- TECOTEC Group ký kết hợp tác với Nelen & Schuurmans – Hà Lan
- TECOTEC Group phối hợp Hãng ST Engineering tổ chức hội thảo “An toàn, an ninh mạng trong chuyển đổi số” tại Sở Thông tin và Truyền thông tỉnh Khánh Hòa
- TECOTEC THAM DỰ HỌP QUẢN LÝ DỊCH VỤ SAU BÁN HÀNG CỦA SHIMADZU
- TECOTEC BÀN GIAO MÁY QUANG PHỔ HUỲNH QUANG TIA X EDX-7000 TẠI NIDEC CHAUN CHOUNG VIỆT NAM
- TECOTEC LẮP ĐẶT HỆ THỐNG XỬ LÝ PHOI – LANNER/ ĐỨC
- TECOTEC BÀN GIAO MÁY QUANG PHỔ HUỲNH QUANG TIA X EDX-LE TẠI DYT VINA