
Tin chuyên ngành
Thiết bị Huấn luyện Mục tiêu Sonar (STT) trên nền tảng một tàu ngầm không người lái (AUV) đa chức năng và ứng dụng Bộ Phát đáp Sonar (STM) mới được phát triển.
Trong quá trình huấn luyện tác chiến của đội sonar cần có những mục tiêu thực cho bộ cảm biến sonar (sonar sensor). Những mục tiêu thực ở đây là những tàu ngầm kích cỡ khác nhau, thủy lôi và ngư lôi. Việc sử dụng mục tiêu thực đòi hỏi chi phí rất lớn, do vậy việc tạo ra những mục tiêu nhân tạo có khả năng mô phỏng chính xác các mục tiêu thực là rất cần thiết. Hệ thống này bao gồm một phao nổi kết nối qua sóng vô tuyến với trạm điều khiển được đặt trên tàu. Hệ thống cần có những yêu cầu hoạt động như sau:
Trong quá trình huấn luyện tác chiến của đội sonar cần có những mục tiêu thực cho bộ cảm biến sonar (sonar sensor). Những mục tiêu thực ở đây là những tàu ngầm kích cỡ khác nhau, thủy lôi và ngư lôi. Việc sử dụng mục tiêu thực đòi hỏi chi phí rất lớn, do vậy việc tạo ra những mục tiêu nhân tạo có khả năng mô phỏng chính xác các mục tiêu thực là rất cần thiết. Hệ thống này bao gồm một phao nổi kết nối qua sóng vô tuyến với trạm điều khiển được đặt trên tàu. Hệ thống cần có những yêu cầu hoạt động như sau:
- Mục tiêu tự di chuyển được với vận tốc tối đa lên tới 6 knots (3.01 m/s)
- Thiết bị nhỏ gọn đủ để có thể đặt vào vị trí và thu hồi bởi 2 người trên 1 xuồng.
- Mục tiêu có khả năng mô phỏng tàu ngầm với khả năng phát sóng âm lên tới 20dB, có khả năng hiện sáng như mục tiêu (target highlight) và khuyếch đại âm phản xạ (echo stretch).
Nền tảng AUV
Tàu ngầm không người lái tại Hafmynd được lựa chọn để chứa các thiết bị. Tàu ngầm đa chức năng có tính linh hoạt cao, có thể xách tay và được thiết kế để người sử dụng có thể thay đổi các bộ phận tháo rời được của tàu. Tàu ngầm không người lái có thể mang theo một loạt các bộ cảm biến (sensor) bao gồm các máy quay, máy quét sonar đáy biển (side scan sonar), sonar đo sâu chính xác IHO (Hội Thủy văn Quốc tế), những cảm biến môi trường khác nhau và các cấu hình chứa các thiết bị yêu cầu khác.

Một trong những ưu điểm nổi bật của hệ thống là có thể dễ dàng thiết lập lại bằng cách thay đổi mô đun tải trọng, vì vậy hệ thống này có thể sử dụng làm mục tiêu huấn luyện sonar trong hôm trước và sử dụng làm thiết bị dò bãi thủy lôi với cảm ứng quét đáy vào ngày hôm sau.
Giao diện - Người - Thiết bị của hệ thống
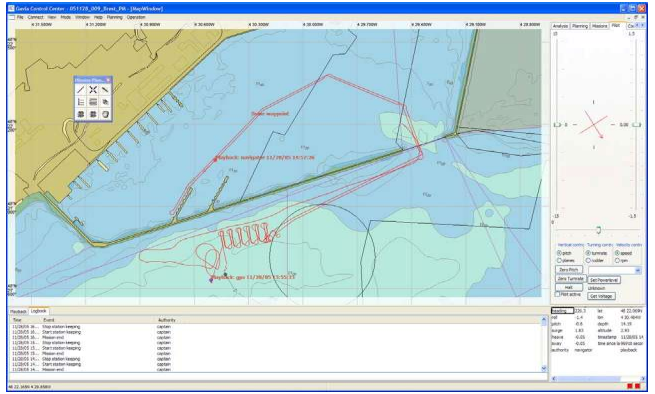
Tất cả các việc từ thiết lập tàu ngầm AUV cho nhiệm vụ đến việc điều chỉnh và kích hoạt các chức năng mô đun tải đều được thực hiện trên giao diện đồ họa với máy tính điểu khiển. Việc đọc kết quả và dữ liệu thu thập cũng được thực hiện một cách tương tự.
Một ví dụ về đọc kết quả thu thập thể hiện trong hình dưới. Sơ đồ ghi lại các vị trí của tàu ngầm sau khi di chuyển đến vị trí cảng và quay về (đường màu đỏ).
Khoảng cách di chuyển trong giai đoạn ban đầu và chuyển tiếp vào và ra khoỉ cảng là 8.3km
Độ chính xác định vị khoảng 4m, do sự khác nhau giữa định vị GPS và định vị INS sau khi thực hiện hành trình zíc zắc tại điểm tàu đậu và nổi lên bề mặt.
Những thông số kỹ thuật chính:
- Cân nặng khoảng 65kg, chiều dài 2.70m.
- Tốc độ tối đa 6 knots (3.01 m/s). Khả năng thực hiện nhiệm vụ khoảng 120 phút.
Lên kế hoạch nhiệm vụ với giao diện đồ họa trên máy tính điều khiển. Kết nối tốc độ cao giữa máy tính điều khiển và tàu qua mạng không dây WLAN trong điều kiện đang nổi và nằm trong tầm sóng WLAN. Đọc các dữ liệu được lưu nhập từ các sensor khác nhau bao gồm cả STM (Bộ Phát đáp Sonar) sau khi hoàn thành nhiệm vụ.
Độ sâu lặn của thiết bị là 300m.

Những thử thách trong quá trình phát triển
Bộ Phát đáp Sonar mới cho tàu ngầm không người lái
Dựa vào những trải nghiệm tốt với hệ thống, khách hang đã chọn tiến hành thu nhỏ các thiết bị điện tử của TECAL-13 để vừa với thể tích bộ phận lắp rời trên tàu ngầm không người lái và để bổ sung thêm những thay đổi cần thiết để chuyển từ một hệ thống tĩnh sang hệ thống động.Những thử thách chính gặp phải như sau:
- Tách biệt máy thu và máy phát cho phép thực hiện đồng thời nhận và phát tín hiệu mà không gặp hiện tượng “lặp vòng”(sing around - Hiện tượng độ khuyếch đại tăng mạnh khi đặt micro ở gần loa).
- Tìm bộ chuyển đổi vừa đáp ứng được độ nhạy phát sóng tần số thấp vừa đủ nhỏ để lắp ghép vào tàu (đường kính 20cm).
- Tối ưu hóa máy phát với bộ chuyển đổi để có năng lượng phát đủ lớn với mức năng lượng nằm trong khả năng cung cấp bị hạn chế bởi dung lượng ắc quy.
- Lắp ráp các bộ phận của bộ chuyển đổi để thích hợp với dải sóng của các sensor sonar sử dụng trong Hải quân.
- Giới thiệu chế độ lệnh âm thanh (acoustic command mode) sử dụng Điện thoại Dưới Nước.
Mô tả giải pháp
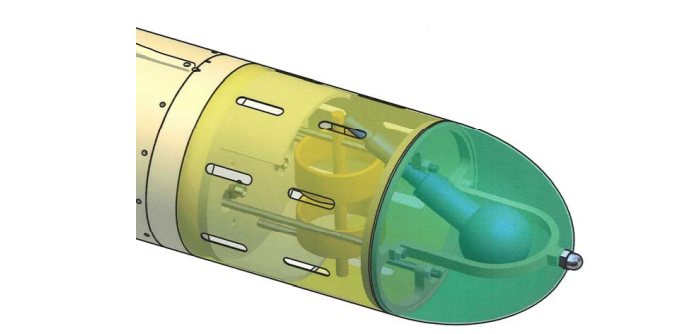
Bộ Phát Đáp Sonar (STM) bao gồm một buồng chứa bộ biến đổi ngập, một buồng thiết bị điện tử và một ống nghe dưới nước kéo 10m sau tàu ngầm không người lái AUV
a) Dải tần
Các bộ cảm biến sonar hoạt động (active sonar sensor) có thể được chia thành các nhóm dải tần sau:
- Sonar tần số rất thấp có dải hoạt động từ 1 đến 3 kHz.
- Sonar tần số thấp có dải hoạt động từ 5 đến 12 kHz.
- Sonar tần số trung bình có dải hoạt động từ 12 đến 24 kHz.
- Sonar tần số cao có dải hoạt động từ 24 đến 48 kHz.
- Sonar dò mìn sử dụng dải tần số cao hơn.
Kích cỡ của tàu không cho phép lắp đặt các bộ chuyển đổi hiệu suất cao đối với dải tần số rất thấp. Trong dải tần số từ 5 kHz đến 48 kHz, các bộ chuyển đổi và mạch phù hợp có thể được tối ưu hóa đối với ba dải tần sonar, thông thường phù hợp với các sensor sonar trong hải quân.
Đối với “nhiễu thụ động” với công suất đầu ra thấp, dải tần hoạt động từ 3 kHz đến 20 kHz.
b) Hướng tính bộ chuyển đổi
Công dụng định hướng được thể hiện ở dạng sau đây:
- Công suất đầu ra lớn nhất phía mạn tàu và phía mũi tàu.
- Giảm tối thiểu 10 dB về phía sau nơi kéo ống nghe dưới nước.
- Giảm năng lượng phát lên trên phía mặt nước và xuống dưới phía đáy biển để giảm hiện tượng năng lượng phản xạ trở lại ống nghe.
Kết quả định hướng này đối với người sử dụng sẽ cho hình ảnh tương đương với ảnh phản xạ của tàu ngầm trên giản đồ cực với phản chiếu lớn nhất ở phía mạn tàu.
c) Ống nghe thủy âm
Ống nghe thủy âm có hình cầu với đường kính 20 mm với đáp ứng tần phẳng (flat frequency response) đối với dải thực tại. Ống nghe thủy âm được kết nối với tàu bằng kết nối yéu để tránh tàu bị vướng vào chướng ngại vật ở đáy. Ống nghe thủy âm được kéo 10 m phía sau tàu.
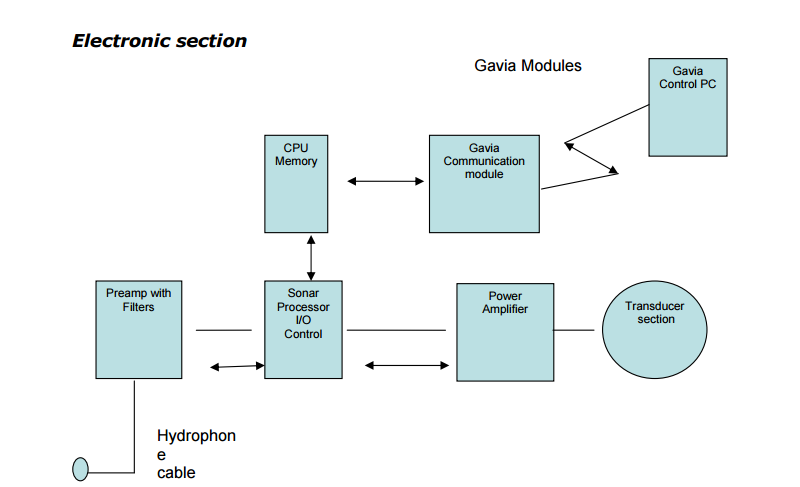
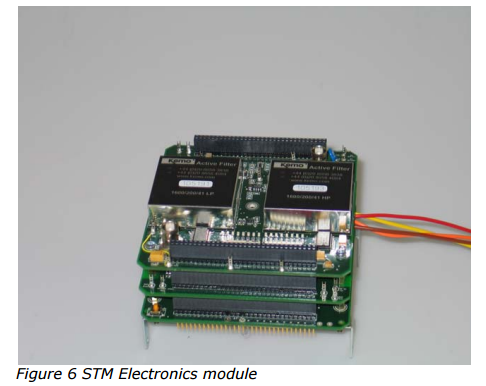
Khoang điện tử
Các chế độ hoạt động
Sản phẩm kết quả đạt được là công nghệ đã được chứng tỏ trong quá trình sử dụng của hệ thống TECAL-13 và được thu nhỏ để phù hợp với tàu. Tuy kích cỡ thiết bị của phần cứng là khác nhau, nhưng về sơ đồ cấu tạo là giống nhau chỉ trừ bộ khuyếch đại công suất có công suất thấp hơn.
Phần firmware của hệ thống được giữ nguyên, và sự tương đồng giữa hai hệ thống cho phép những nâng cấp trong tương lai có thể áp dụng cho cả hai hệ thống.
Ở đây chúng tôi muốn làm nổi bật một vài khả năng vận hành:
Chế độ phản hồi lặp lại: Đối với bộ cảm ứng sonar, thiết bị mục tiêu huấn luyện sonar STT sẽ trông như một tàu ngầm có vận tốc bằng vận tốc thiết bị STT với khả năng phát ra âm lượng (target strength) lớn nhất là 20dB, tương đương với một tầu ngầm hạng trung.
Chế độ lặp lại phản hồi được lưu giữ từ trước: Khi thiết bị STT phát hiện ra xung sonar, một phản hồi được lưu từ trước được phát và lặp lại. Chế độ này có khả năng cung cấp công suất lớn nhất, đồng thời không xảy ra hiện tượng “lặp vòng” (sing around), và có thể phát ra sóng âm lớn nhất là 40 dB.
Tạo điểm sáng mục tiêu: Âm phản hồi có thể được điều khiển giống theo kiểu phản hồi của những mục tiêu có kích thước hữu hạn. Những mục tiêu khác nhau có thể được mặc định trước và lưu trong một thư mục bộ nhớ với nhiều góc lệch khác nhau. Khi hệ thống được lập trình để mô phỏng sự chuyển hướng của mục tiêu, có thể lệnh cho thiết bị phát đáp STM phát ra một cấu trúc tín hiệu phản hồi đại diện cho một góc lệch của mục tiêu tương ứng với góc quay của nó.
“Chế độ thụ động”: Thiết bị phát đáp STM có khả năng phát ra những nhịp tín hiệu hay những âm thanh được lưu trước trong bộ nhớ một cách liên tục hoặc có cách khoảng, với nhiều mức độ khác nhau – tăng lên hoặc giảm xuống. Chế độ này có thể được sử dụng để xác định mục tiêu là tàu giữa các mục tiêu khác, để mô phỏng một cuộc tấn công ngư lôi hay để báo trước các tàu ở trên mặt nước khi nổi lên mặt nước.
Lệnh Điều khiển UWT: UWT(Under water telephone) có thể được sử dụng để điều khiển Mục tiêu Huấn luyện Sonar STT. Ưu điểm của phương pháp này là điện thoại dưới nước có công suất lớn hơn nhiều so với một modem và không có hạn chế về tần số đối với sonar do tần số của modem gây ra. UWT chỉ được sử dụng để đưa ra lệnh thoát và lệnh thay đổi chế độ hoạt động, trong khi STT vẫn tiếp tục thực hiện kế hoạch đặt ra từ trước mà không bị gián đoạn từ những con tàu khác. Lệnh này được chuyển tiếp từ Bộ Phát đáp Sonar STM tới bộ điều khiển nhiệm vụ ở trong tàu.
Vận hành Thiết bị Huấn luyện Sonar STT
Quá trình vận hành được tiến hành trên một vùng biển với kích thước xác đinh, thường là 5 x 5 hải lý. Quá trình vận hành bao gồm những giai đoạn sau:
Lập kế hoạch và điều khiển nhiệm vụ
Giai đoạn này cũng bao gồm việc cân bằng tàu phù hợp với độ mặn nước biển tại vùng diễn ra nhiệm vụ. Kế hoạch di chuyển và sử dụng những loại sensor khác nhau được điều khiển bởi máy tính kết nối với tàu.
Triển khai tàu
Việc triển khai tàu xuống nước được tiến hành bởi một đội hai người trên một xuống nhỏ, sau đó tàu tự thực hiện nhiệm vụ được lập trình sẵn. Trước khi lặn, vị trí của tàu được xác định qua GPS, việc định vị điều hướng tiếp theo được thực hiện bằng phương pháp máy đo tốc Doppler và hệ đạo hàng quán tính (INS). Độ mặn của nước được theo dõi bằng máy đo tốc độ âm thanh. Khi độ mặn vượt quá giới hạn được đặt trước sẽ phải có các biện pháp xử lí.
Bài huấn luyện Sonar
Trong bài huấn luyện, âm thanh phản hồi từ STT sẽ giống với âm phản hồi từ một tàu ngầm thực. Máy theo dõi mục tiêu sonar sẽ thấy các yếu tố như khoảng cách, phương và tốc độ của STT thống nhất với các yếu tố này trên tàu ngầm thực. Nếu một cuộc tập huấn diễn ra với sự tham gia của nhiều tàu sonar, tàu STT có khả năng đáp lại nhiều sonar với tần số khác nhau khi các xung phát tách biệt theo thời gian.
Kết thúc bài huấn luyện:
Khi bài tập kết thúc, hoặc do hết thời gian hoặc do có lệnh kết thúc từ Điện thoại Dưới Nước UWT, tàu sẽ nổi lên mặt nước. Cập nhật vị trí bằng GPS và báo cáo vị trí vừa cập nhật. Tàu sẽ được thu lại bởi một đội 2 người trên xuồng. Sau đó có thể thu thập các tập tin đã được ghi lại.
Nguồn: RSI
Các bài viết khác
- QUY ĐỊNH MỚI VỀ XÁC ĐỊNH XUẤT XỨ HÀNG HÓA XUẤT, NHẬP KHẨU
- GIẢM THUẾ GTGT TỪ 10% XUỐNG 8% TỪ NGÀY 1/7/2023
- TECOTEC Group ký kết hợp tác với Nelen & Schuurmans – Hà Lan
- TECOTEC Group phối hợp Hãng ST Engineering tổ chức hội thảo “An toàn, an ninh mạng trong chuyển đổi số” tại Sở Thông tin và Truyền thông tỉnh Khánh Hòa
- TECOTEC THAM DỰ HỌP QUẢN LÝ DỊCH VỤ SAU BÁN HÀNG CỦA SHIMADZU
- TECOTEC BÀN GIAO MÁY QUANG PHỔ HUỲNH QUANG TIA X EDX-7000 TẠI NIDEC CHAUN CHOUNG VIỆT NAM
- TECOTEC LẮP ĐẶT HỆ THỐNG XỬ LÝ PHOI – LANNER/ ĐỨC
- TECOTEC BÀN GIAO MÁY QUANG PHỔ HUỲNH QUANG TIA X EDX-LE TẠI DYT VINA